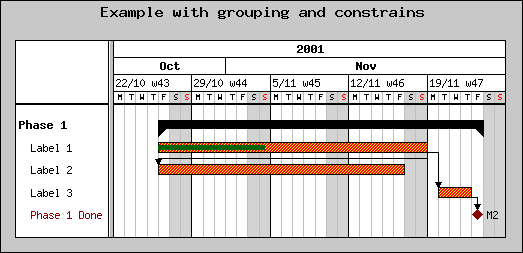
Figure 167: The original Gantt schema we wich to add constrains to [src]
With Gantt charts there is often the need to illustrate constrains between one or several activities. One of the most common constrain is that on activity can't start before an other activity finish.
JpGraph support visualizing the following types of constrains
An example will clarify how to specify a constrain between two activities.
Assume that we start with the Gantt schema as illustrated below
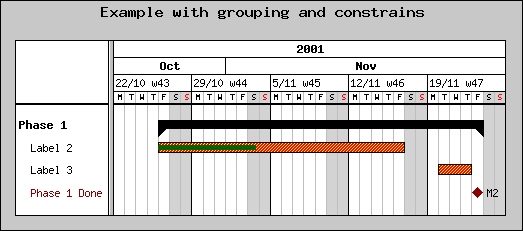
We would now like to add the constrains that the activity "Label 3" cant start before activity "Label 2" has finished and that the milestone "Phase 1 done" is depending on when activity "Label 3" is done.
The principle of adding constrains is that you for each activity you want to have a constrain you have to tell to what other activity this constrain should be to. That other activity is specified by telling on what row that activity lies. Depending on what type of constrain, e.g. Start-to-End, an arrow will now connect the two activities in correct way.
The way to do this is to call the SetConstrain() method on the activity. In this method you specify the type of constrain as well as to what other activity this constrain should be to. If you read the class reference you can also see that you can specify the type and size of arrow used. For now we will just use the default sizes and type.
So for example to add an End-To-Start constrain between "Label 2" and "Label 3" you could write
$bar2->
SetConstrain(2,CONSTRAIN_ENDSTART)The first parameter in the call above "2" is the row of the target activity (i.e. the row where "Label 3") activity is. In the example below we have added the constrains we wanted.
A note: The actual path followed by the arrow is controlled by some heuristics to make it clear what the constrain is. It has been a design decision that in order to keep the API simple the user has no further detailed controlled on the actual path followed. However, in future version the heuristics may be extended and provide some user-controllable parameters.